
Армия США любит свои игрушки и платит за них много денег, поэтому, естественно, разочаровывается, когда устройства оказываются бесполезными или не эффективными. В 1980-х годах армия считала, что примерно половина суши на планете непроходима для обычных колесных или гусеничных машин, или всего ее наземного флота. Очевидно, это была проблема, поэтому она в партнерстве с Университетом штата Огайо и несколькими внешними подрядчиками разработала автомобиль с адаптивной подвеской: шестиногий гидравлический робот размером с грузовик, управляемый одним оператором.
Хотя это было очень сложно и одинаково медленно, это была успешная попытка перенести локомоцию на искусственных ногах со страниц научной фантастики в реальность, опередив Boston Dynamics в жуткой механизированной игре с животными на добрых два десятилетия, сообщает kratko-news.com.

Проект ASV, финансируемый Агентством перспективных оборонных исследований (DARPA), начался в OSU в январе 1981 года. Под руководством Роберта МакГи и Кеннета Уолдрона — профессоров университета — машина разрабатывалась в течение следующих девяти лет. В отличие от других более грубых экспериментов, которые предшествовали этому, машина OSU будет включать в себя массив из 17 компьютеров, чтобы гарантировать, что оператор транспортного средства не будет физически и морально истощен после дня управления каждым шагом, сделанным шестью ногами ASV.
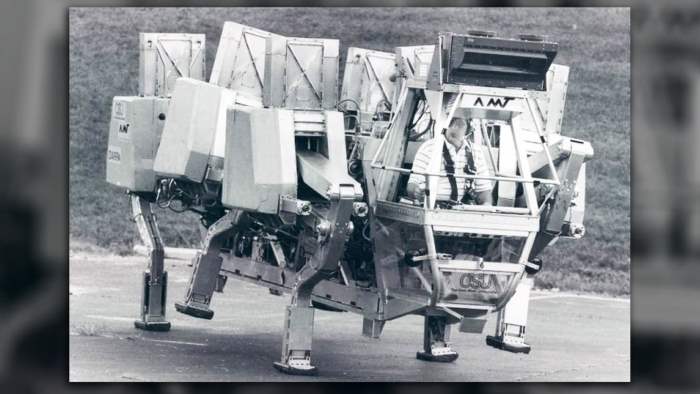
Имейте в виду, что эти компьютеры невероятно слабые по сегодняшним меркам. Эти массивные прямоугольные коробки, которые вы видите над металлическими плечами автомобиля, являются чем-то вроде гидравлического резервуара, в каждом из них находится один из шести 8-битных компьютеров Intel 86/30 128k, управляющих опорами.

Остальные, всего 11 человек, выполняли различные другие задачи, такие как управление дисплеями ЭЛТ внутри кабины, анализ всех данных, собранных с ног и датчиков давления в ступнях, и определение наилучшей опоры для машины на основе данных из сканирующий дальномер 128×128 пикселей, установленный над кабиной. Все эти данные были затем интерпретированы операционным программным обеспечением транспортного средства, написанным на языке Паскаль и состоящим из 150 000 строк исходного кода, чтобы заставить ASV двигаться вперед.
На этом компьютеризированный элемент заканчивается и начинается механический и человеческий элементы. Оператор с помощью клавиатуры и джойстика указывает ASV, куда идти, и затем он отправляется в этом направлении. В некоторых литературных источниках подразумевается, что конечной целью было сделать эту машину автономной, однако в то время команда OSU была явно ограничена вычислительной мощностью — даже несмотря на то, что они получали от DARPA миллион долларов каждый год на финансирование проекта.